
|
|||||||||||
|
|||||||||||
|
Энкодер питается от 8 – 30 В, а большинство устройств и микросхем имеют входа TTL и CMOS. Поэтому для согласования напряжения питания необходимо использовать устройства для согласования уровней. В качестве такого устройства используется параметрический стабилизатор, состоящий из резистора и стабилитрона. Так как необходимый нам уровень сигнала – 5 В, выбираем стабилитрон BZV55 – C51V, который имеет напряжение стабилизации 5,1 В и ток стабилизации 80 мА. Типичная схема параметрического стабилизатора показана на рисунке 1.
Рисунок 1 – Типовая схема параметрического стабилизатора На вход подается напряжение с датчика скорости (как выше было отмечено от 8 до 30 В) в нашем случае примем 12 В, напряжение на выходе – 5 В. Так как входной ток большинства микросхем и приборов очень мал, им можно пренебречь, поэтому Iн=0. Таким образом согласно первому закону Кирхгофа I=Iст=80 мА.
Так как максимальный выходной ток энкодера 20 мА, решим эту задачу опираясь на эти данные. Примем Iст=15 мА.
Также для сглаживания высокочастотных пульсаций и шумов в сигналах каналов датчика скорости необходим конденсатор для сглаживания высокочастотных помех, пример осциллограммы показан на рисунке 2.
Рисунок 2 – Высокочастотные помехи при передаче сигналов Согласно теоремы Котельникова, конденсатор должен быть рассчитан на частоту в 2 – 3 раза большую частоты работы системы. В нашем случае это частота 4 – 6 МГц. Из-за предельных частотных характеристик схемы, значения резисторов и конденсаторов должно быть рассчитаны таким образом, чтобы микроконтроллер не пропустил ни одного сигнала. Для их расчета используйте следующую формулу:
Для расчета значений R и C необходимо:
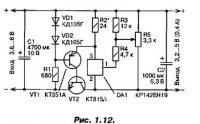
Таким образом спроектированный адаптер имеет следующую схему подключения, представленную на рисунке 3 и печатной платы представленной на рисунках 4, 5.
Рисунок 3 – Схема адаптера
Рисунок 4 — Внешний вид печатной платы адаптера
Рисунок 5 – Внешний вид печатной платы адаптера
Источник: https://redblot.ru/
|
 Несмотря на то, что сейчас появились микросхемы низковольтных (3...5 В) стабилизаторов напряжения с малым падением напряжения, они еще пока мало распространены, особенно среди радиолюбителей. А ведь низковольтные стабилизаторы сейчас приобретают особую актуальность.
Несмотря на то, что сейчас появились микросхемы низковольтных (3...5 В) стабилизаторов напряжения с малым падением напряжения, они еще пока мало распространены, особенно среди радиолюбителей. А ведь низковольтные стабилизаторы сейчас приобретают особую актуальность. В сетевых фильтрах часто используют хитрые конденсаторы с непонятными многим надписями — X1, Y2 и т.п. Это - помехоподавляющие конденсаторы. Разобраться в том, зачем они нужны и чем отличаются от «просто конденсаторов» поможет эта статья.
В сетевых фильтрах часто используют хитрые конденсаторы с непонятными многим надписями — X1, Y2 и т.п. Это - помехоподавляющие конденсаторы. Разобраться в том, зачем они нужны и чем отличаются от «просто конденсаторов» поможет эта статья. Проблема фона переменного тока в ламповых усилителях имеет первостепенное значение. Но в особенность остро она стоит в предварительных усилителях. Полностью удалить фон классическими средствами практически невозможно, даже при использовании очень габаритных деталей.
Проблема фона переменного тока в ламповых усилителях имеет первостепенное значение. Но в особенность остро она стоит в предварительных усилителях. Полностью удалить фон классическими средствами практически невозможно, даже при использовании очень габаритных деталей. Схема стабилизации выходных напряжений в рассматриваемом классе ИБП представляет собой замкнутую петлю автоматического регулирования...
Схема стабилизации выходных напряжений в рассматриваемом классе ИБП представляет собой замкнутую петлю автоматического регулирования... Интегральные микросхемы серии LM2931 производства фирм Motorola и Texas Instruments представляют собой линейные стабилизаторы напряжения положительной полярности с малым напряжением насыщения.
Интегральные микросхемы серии LM2931 производства фирм Motorola и Texas Instruments представляют собой линейные стабилизаторы напряжения положительной полярности с малым напряжением насыщения.














